TRD-D工法机电气控制系统及纠偏功能
2015-03-23
729
0
核心提示:叶恺
(上海工程机械厂有限公司 上海 200072)
摘 要:TRD工法机具有切削能力强、结构强度高、适用范围广、行走灵活、运行平
叶恺
(上海工程机械厂有限公司 上海 200072)
摘 要:TRD工法机具有切削能力强、结构强度高、适用范围广、行走灵活、运行平稳、操作简单、智能控制、维修方便等特点,适用于地下连续墙施工和地基础改良施工,满足我国现有地下连续墙施工需求。本文对上海工程机械厂有限公司研发的TRD-D工法机电气控制系统各个组成部分以及自动纠偏功能进行逐一的介绍。
关键词:TRD工法;地下连续墙;控制系统;自动纠偏
1.TRD工法简述:
TRD工法由日本90年代初开发研制,是能在各类土层和砂砾石层中连续成墙的成套设备和施工方法。其基本原理是利用链锯式刀具箱竖直插入地层中,然后作水平横向运动,同时由链条带动刀具作上下的回转运动,搅拌混台原土并灌入水泥浆,形成一定厚度的墙体,以取代目前常用的高压喷射灌浆,单轴和多轴水泥土搅拌桩组成的柱列式地下连续墙。TRD工法机主要应用于建筑物的基础工程、地下道路及盾构的竖井、大型垃圾填埋场、地铁交叉口工作井、基础的挡土墙、止水墙、港湾及大型水库堤防的地基加固止水等施工工程。
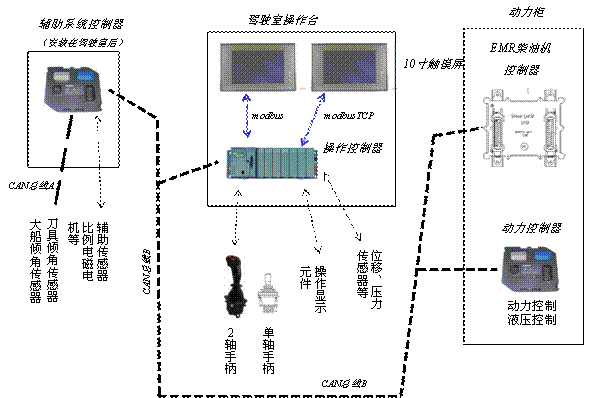
2.TRD-D工法机电气控制系统:
TRD-D工法机电气控制系统由驾驶室操作控制台、辅助系统控制箱(含动力配电)、动力控制箱(含柴油机就地控制盘)、多组压力传感器、多组位移传感器、多组倾角传感器和操作手柄按钮指示仪表组成。
驾驶室操作控制台设置操作控制器、两台10英寸触摸显示操作屏、配置操作手柄按钮指示灯仪表,辅助系统控制箱配置辅助系统控制器、动力控制箱配置动力控制器、设置高防护就地控制盘、柴油机动力柜配置EMR柴油机控制器(柴油机配套)。驾驶室操作控制台安装在驾驶室前部,辅助系统控制箱安装在驾驶室后部,动力控制箱则安装在柴油机动力柜上。
图1 电气控制系统图
2.1控制器
操作控制器、辅助系统控制器、动力控制器则采用工程机械专用可编程控制器,工程控制器是专门针对行走机械控制而设计的控制器,能够适应行走机械的恶劣的工作环境如:温度变化范围大、高振动、高冲击、强电磁干扰等。配置如下:
控制器编程符合IEC61131-3,使用CoDeSys软件进行应用程序开发。
每台控制器具有52路特殊设计的I/O 端口
可承受高达100G 的冲击和震动
IP67防护等级。
控制器有两个CAN口,CAN2.0B,任意一个CAN口可以设置为CANOpen协议。
2.2控制网络
控制网络配置为2级,采用分布控制模式。
一级网络是操作控制器、辅助系统控制器、动力控制器、EMR柴油机控制器通过250KBPS CAN2.0A工业现场总线互联;二级网络是辅助系统控制器通过独立CANOPEN现场总线和6组杆式倾角传感器、1只安装于驱动部倾角传感器、1只安装于平台倾角传感器、1只安装于门型架倾角传感器互联。同时操作控制器分别通过MODBUS、MODBUSTCP和两台触摸操作显示屏连接。
2.3触摸显示屏
触摸操作显示屏共配置2台。
主显示屏选用触摸显示屏,modbus总线接口,专用于刀具、大船船体、动力头支架等倾角显示。
辅显示屏选用触摸显示屏,modbusTCP总线接口,用于各压力、位移、开关状态显示和操作控制。
 图2 主显示屏界面
图2 主显示屏界面
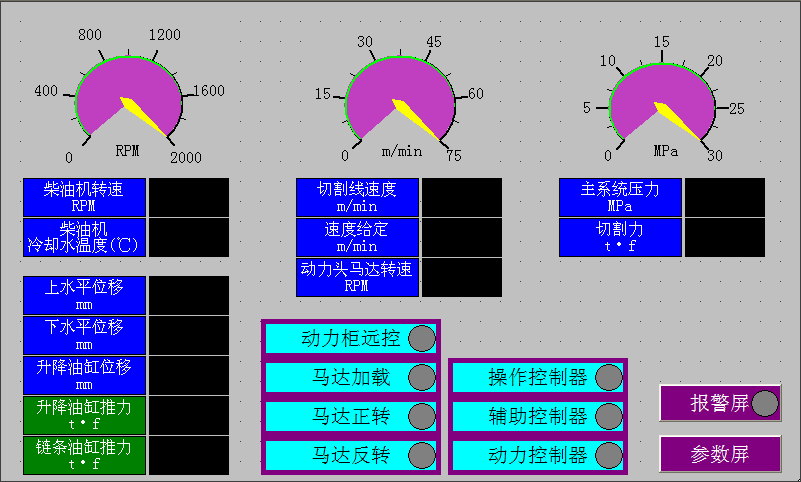
图3 辅显示屏界面
操作控制台分低位操作台和高位操作台,低位操作台用于TRD-D工法机驱动部和底盘行走操作,内置操作台控制器,台面设置触摸屏显示器;高位控制台则用于柴油机远程控制。
 图4 操作台台面布置
图4 操作台台面布置
主控制柜安装在柴油机主泵动力集装箱内,包含控制器、主控电源回路配电、照明配电、接线端子、中间继电器等。主控制柜采用防尘结构,配钥匙门锁。
2.6动力柜控制箱
动力柜控制箱是主控柜的补充,是远端IO扩展箱,用于动力柜的信号和执行器统一控制管理。主要控制说明:
2.6.1驱动部水平缸控制
控制系统可实现上下两组水平缸的同步控制,控制方式可选择单动、交叉和同步。根据实时获得的水平缸作用力的数据,可实现作用力和位置控制的限制和切换,具有超载连锁保护、速度可调、故障自动退出等基本功能。控制系统采用位移压力闭环控制模式。
2.6.2驱动部斜撑缸控制
通过驱动部倾角状态独立开关调整斜撑缸伸缩长度,符合施工工艺要求后自动液压锁定。
2.6.3刀具马达切削控制
通过主泵组流量控制压力比例阀,实现在功率曲线工作区域内的转速控制,当负载增加到接近曲线边缘时,系统自动减少流量输出,降低转速,反之亦然。
2.6.4链条涨紧控制
链条涨紧控制采用涨紧液压油缸伸出后加压锁定方式,当涨紧压力低于设定值时,系统自动解锁补压。
2.6.5切割箱倾角和切削深度监控
切割箱折线显示共有7段,每段设置XY轴倾角传感器,控制系统可模拟出X、Y方向上的切割箱空间曲线模型,进而计算出X、Y方向偏移量和切削深度数据(结合升降缸数据)。
2.6.6步履行走控制
设计为步履纵移、横移单缸单控手动电比例阀,采用 4片1组配置,操作台设置相应模拟式手柄,步履支腿顶升则采用电磁阀和同步马达控制方式,控制信号进入主控制器。
2.6.7报警及急停操作
主控柜和操作台均设置声光报警灯和急停开关。
 图5 动力操作盘布置
图5 动力操作盘布置
驾驶室操作台配置5只霍尔型双轴主令无级操作手柄(用于大船纵移横移和斜撑油缸操作控制)及1只双轴无级调速手柄(配模式切换开关,用于机头水平速度操作控制),操作手柄采用)0~5V标准信号接口方式,工作状态10%~50%~90%Vdc电压输出。
2.8传感器
控制系统配置压力、温度、磁致伸缩位移、拉线位移、编码器、倾角传感器多组,分别如下:
2.8.1切割箱双轴倾角传感器
为满足切割箱工作环境和安装需要,双轴倾角传感器采用IP68特殊封装,即传感器封装在带导向空心金属连杆中,连杆通过上下端快速接头连接安装在切割箱中,起到定位和保护作用。传感器连接则采用5芯水下连接器互连。
倾角传感器测量范围±15°,分辨率0.01°,采用CANopen总线接口,数量6只。
2.8.2驱动部倾角传感器、平台倾角传感器、门型架倾角传感器
该类型两轴倾角传感器仍采用IP68金属灌浆封装,为盒状带法兰结构,XY双轴倾角测量范围±15°,分辨率0.01°,采用CANopen总线接口,数量3只。
2.8.3转速编码器
采用空心轴增量编码器,IP67防护等级,编码器在动力头马达串联轴安装,用于动力头转速测量。
2.8.4压力传感器
压力传感器分4MPa,40MPa两种规格,约18只,精度0.25,G1/4螺纹接口,4~20mA两线制信号接口。分别用于测量链条,主泵,顶升液压油缸,斜撑液压油缸,大泵小泵的压力。
2.8.5磁致伸缩位移传感器
采用磁致伸缩位移传感器,测量范围分别为1050mm 2只,1250mm 2只,用于斜撑和横移油缸。
2.8.6拉线位移传感器
TRD-D工法机驱动部升降位移测量采用电位器式拉线位移传感器一只,行程5.5米,0~5VDC信号接口,用于顶升油缸。
2.8.7.温度传感器
一体化温度传感器1只,4~20mA信号接口。用于液压油箱温度测量。
2.9分线盒及电线电缆连接器
为简化现场安装维护和设备分解运输需要,设备设置2~4处防水分线盒,主分线盒设置多芯电缆连接器。控制电缆和动力电缆分类布置,倾角传感器配置专用船用电缆。
3.TRD-D工法机纠偏功能:
TRD-D工法机驱动部测斜纠偏控制系统是一个基于CAN总线技术的自动纠偏控制系统。TRD-D工法机在施工过程中,驱动部会在纵向产生偏斜,该系统通过控制桅杆纵向偏移角度,使驱动部以及切割箱的纵向倾角达到符合工程预计的角度要求。工法机驾驶员通过观察倾角显示屏显示的倾角读数调整左、右斜撑油缸的伸缩长度,使切割箱达到符合成墙要求的角度,此时控制器读取安装于左、右两侧斜撑油缸内的磁致伸缩位移传感器的数据,且将该数据记录保存为数值(显示于主显示屏参数屏界面),该数值代表TRD-D工法机切割箱达到成墙要求的纵向垂直角度时左右斜撑的伸缩位置。TRD-D工法机工作时,如果左右斜撑油缸的伸缩位置发生改变导致驱动部以及切割箱角度产生偏移,则CAN控制器读取斜撑油缸内的磁致伸缩位移传感器此时的数据(显示于主显示屏参数屏界面),同时CAN控制器发送相应的控制指令给驱动电路,推动电液比例方向阀的开启/关闭,驱动调整左、右斜撑油缸伸出/收回,从而实现倾角的调节。
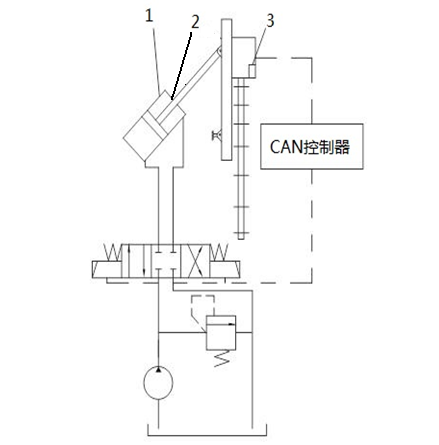 1-斜撑油缸;2-磁致伸缩卫衣传感器;3-驱动部
1-斜撑油缸;2-磁致伸缩卫衣传感器;3-驱动部
图6 控制系统原理图
TRD-D工法机与各类TRD工法设备相比,具有数据监控更全面、精度更高、响应更快、显示界面清晰直观,操作更人性化等优势。驾驶室内部的显示屏采用双触控屏,通过触控切换,可以清晰地同时显示倾斜仪的实时曲线、驱动部和各油缸的实时负载变化、各个压力阀的负荷压力、主副油箱温度、发动机转速等各种数据指标。布置在提升油缸、链条涨紧油缸、斜撑油缸、横切油缸的压力及位移传感器,精确地显示出各机构的工作进给量,外界负载情况等工况参数,帮驾驶员判断实时状态,控制施工进度。自动纠偏功能则能简化驾驶员对于成墙纵向角度的操作量,提升工程质量。TRD-D工法机作为一种符合地下施工发展趋势、具有显著高技术特点的新型水泥土搅拌墙施工设备,具有远大的发展前景。
参考文献:
[1] 张鹏,吴阎松.一种新型地下连续墙施工设备TRD-D工法机.2014第四届深基础工程发展论坛论文集,2014.3:199-205.






 导航
导航